Un nuevo enfoque bioinspirado para dispositivos quirúrgicos y de diagnóstico milimétricos
Las investigaciones realizadas han dado lugar a resultados innovadores en el campo de los dispositivos quirúrgicos y de diagnóstico. Los dispositivos ingeribles, comúnmente utilizados para explorar y tratar áreas anatómicas de difícil acceso dentro del cuerpo humano, se toman en forma de píldoras. Estas cápsulas viajan por el tracto digestivo tomando imágenes o liberando fármacos. Si bien los dispositivos más simples se mueven pasivamente a través del intestino, existen muchas situaciones en las que sería ventajoso que un dispositivo se adhiriera a un tejido u otras superficies flexibles.
La búsqueda de soluciones de inspiración biológica para abordar este desafío tiene una larga historia, que va desde el uso de adhesivos inspirados en velcro y caracoles en el campo médico. Sin embargo, la creación de mecanismos de conexión reversibles bajo demanda que puedan integrarse en dispositivos de tamaño milimétrico para diagnóstico biomédico sigue siendo un desafío importante.
Un nuevo enfoque interdisciplinario, dirigido por expertos como Robert Wood, Harry Lewis, Marlyn McGrath de la Escuela de Ingeniería y Ciencias Aplicadas John A. Paulson (SEAS) de Harvard y James Weaver del Instituto Wyss de Harvard, se inspiró en una fuente inesperada: El mundo de los parásitos. Estas criaturas, a pesar de su reputación a menudo inquietante, están extremadamente adaptadas para anclarse a una amplia gama de tejidos del huésped, utilizando una variedad de órganos de unión específicos.
Imitar la morfología y funcionalidad de estas complejas estructuras biológicas representa un desafío multidisciplinario que involucra experiencia en áreas como robótica, microfabricación, diseño de dispositivos médicos y zoología de invertebrados.
La investigación, publicada en PNAS Nexus, se centró en imitar los mecanismos de ataque de los platelmintos intestinales. Utilizando un método de fabricación en capas de múltiples materiales inspirado en la industria de las placas de circuito impreso, los investigadores han creado un mecanismo con arquitectura radialmente simétrica que permite movimientos biológicamente precisos.
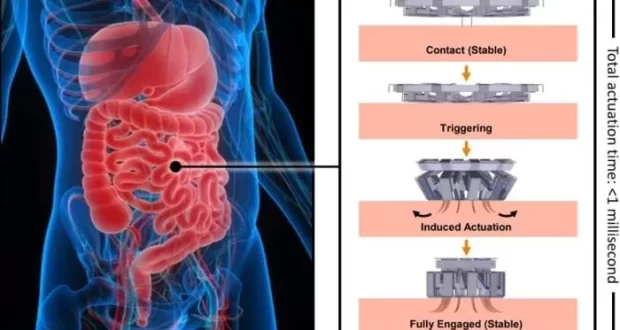
El diseño final del dispositivo incluye componentes rígidos de acero inoxidable conectados a bisagras de polímero. Una vez desplegado, el dispositivo mide menos de 5 milímetros de diámetro y pesa sólo 44 microgramos. Cuando entra en contacto con el tejido, activa un mecanismo que hace que los ganchos de anclaje giren hacia afuera, penetrando el tejido circundante con un daño mínimo.
Gracias a su resorte elastomérico integrado, los ganchos se pueden desplegar en menos de 1 milisegundo. Además, el método de fabricación utilizado ofrece ventajas en términos de rapidez y eficiencia en la producción de pequeños dispositivos.
Los autores señalan que este enfoque podría optimizarse aún más para reducir el tamaño de los dispositivos futuros. El objetivo es aplicar los conocimientos adquiridos para desarrollar dispositivos aún más avanzados, adaptables a diferentes contextos biomédicos.

Una comparación del conjunto de ganchos desplegables de tenia que proporcionó la motivación para el estudio actual (las dos primeras imágenes a la izquierda) y la analogía de ingeniería en escala milimétrica resultante (las dos últimas imágenes a la derecha).
MARES DE HARVARD
Este estudio, financiado por la Fundación Nacional de Ciencias, representa un importante paso adelante en el diseño de dispositivos bioinspirados para aplicaciones biomédicas y más.




